Im Rahmen dieses Teilprojekts wurde das betrachtete Materialflusssystem (Crossdocking-Szenario) aus softwaretechnischer Sicht analysiert. Das Ziel bestand darin, die den Transportmitteln zugrunde liegenden Basismodule bestimmen und die Eigenschaften dieser Module hinsichtlich ihrer Geometrien, der Energieversorgung, Kommunikation und der kognitiven Steuerung zu definieren. Ein grundlegendes Konzept für eine Softwarearchitektur wurde mit allen Partnern auf einem internen CogniLog-Workshop im August 2009 in Oldenburg festgelegt.
Weiterhin wurden die Anforderungen an eine Softwareumgebung für entscheidungsfindende Systeme formuliert. Dies beinhaltet die Definition der entsprechenden Dienste, die bereitgestellt werden müssen, und weiterer Parameter wie Rekonfigurationszeit (Lauf-/Entwurfszeit), Rekonfigurationsgrad, Skalierbarkeit und Echtzeitfähigkeit. Die benötigten Dienste werden von einer vermittelnden Softwarezwischenschicht zur Verfügung gestellt, die die unterschiedlichen Datenströme des Fördersystems, der Sensoren, des ERP-Systems und anderer Steuereinheiten zusammenfasst und der Anwendungsschicht zur Verfügung stellt. In der Anwendungsschicht werden die Steuerungsstrategien und die Software der Benutzungsschnittstelle ausgeführt. Die zu entwickelnden Systeme sollen sich in hohem Maße adaptiv verhalten und auch in nicht explizit programmierten Situationen sinnvolle Reaktionen zeigen. Dazu kommen sowohl aus der KI stammende Methoden zum Einsatz als auch innovative Ansätze aus der Steuerungs- und Kommunikationstechnik.
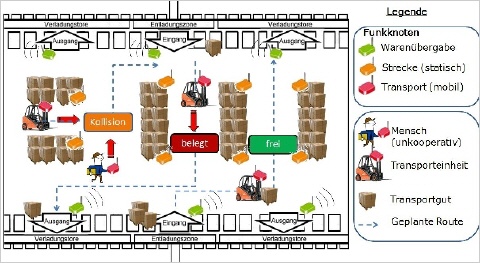
Eine Simulationsumgebung zur Materialflussoptimierung basierend auf der Agentenplattform JADE wurde implementiert, mit der erste dezentrale Steuerungsstrategien anhand des gewählten Crossdocking-Szenarios getestet wurden. Als Aufgaben für das Sensornetzwerk wurden die Lokalisierung von Flurförderzeugen und die dezentrale Speicherung von Routen- und Fördermittelinformationen (Belegung, Statistiken) festgelegt. Zur Analyse und Simulation der dafür notwendigen Protokolle wurde das Simulationswerkzeug TOSSIM um Mobilitätsmodelle und eine grafische Oberfläche erweitert.

